Hybrid Componentiality
Year: 2018-2020
Project leader: Henriette Bier
Project team: Henriette Bier, Sina Mostafavi, Arwin Hidding, Vera Laszlo, and MSc 3 students
Collaborators / Partners: Emgdotart, 3D Robot Printing, HvA, AE
Funding: 15K
This project has been implemented in collaboration with Hogeschool van Amsterdam (HvA), Adaptive Environments (AE) and with help 3D Robot Printing. It has been partially funded by Emgdotart.
Buildings consists of various material systems. This project explores the connection of wooden linear components with 3D printed nodes. It is a first iteration in a series of studies exploring connections between multiple material systems. It has been financed with funds received from Emdotart and has been robotically 3D printed at 3D Robot Printing.
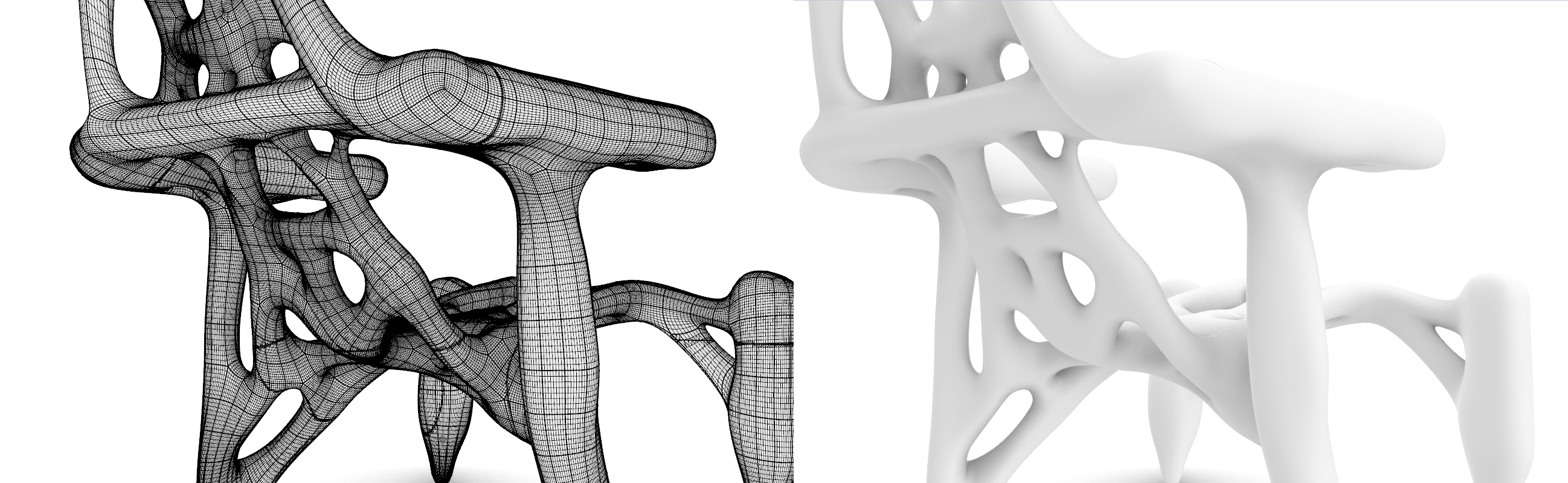
Fig. 1: Fragment of a structural frame with a 3D printed node
Environmental, structural, and acoustic aspects are integrated into the design of panels as well as material and robotic path requirements. Analysis based quantification coupled together with qualitative space generation, as interdependent processes are explored.
The hybrid components are part of a larger partially paneled structural spaceframe. Two Design-to-Robotic-Production and -Operation (D2RP&O) studies are proposed: 1. D2RP: The development of a 3D printed (metal or reinforced plastic) node for connecting linear (wooden) elements of variable lengths and sizes 2. D2RO: The development of interactive/responsive panels fitted with sensor-actuators and to be placed on the structural frame.
Movie 1: Robotic prototyping of acoustic panels implemented at HvA
1. Subtractive D2RP is employed for the wooden acoustic panels. Furthermore, additive D2RP using structural optimization routines, is employed for the node. Several materials are considered and various options are explored: While one exploration engages in a plug-in approach the other involves a grabbing approach. Both present challenges with respect to assembly and maintenance.
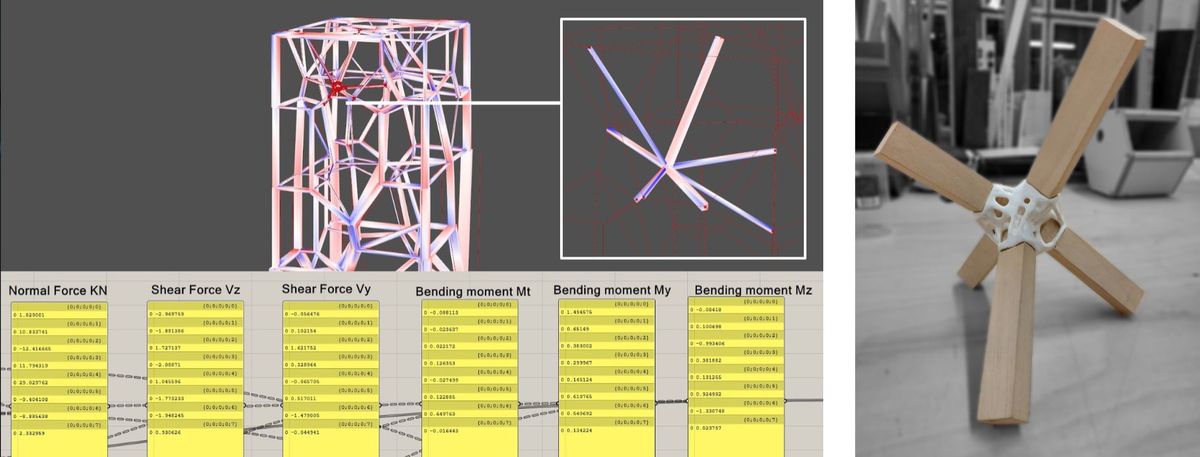
Fig. 2: Structural optimization of the 3D printed node (2nd version)
D2RP involves a conversion from the virtual geometric model, which is often the result of optimization processes (e.g. functional, formal, structural, environmental, etc.), into suitable robotic tool paths to deposit, remove, or transform material in order to materialize the intended design. At a digital level, a parametric form-finding approach involving amongst others functional, structural, and environmental optimization is adopted. This approach relies on computational methods such as the Finite Element Method (FEM), Computational Fluid Dynamics (CFD), etc. Furthermore, material and fabrication constraints are taken into account in order to connect physical materialization with virtual modelling and simulation. This implies that multi-performative design relying on multi-robots production and multi-scale materialisation integrates all requirements from the very beginning of the D2RP process (Bier et al. 2018).
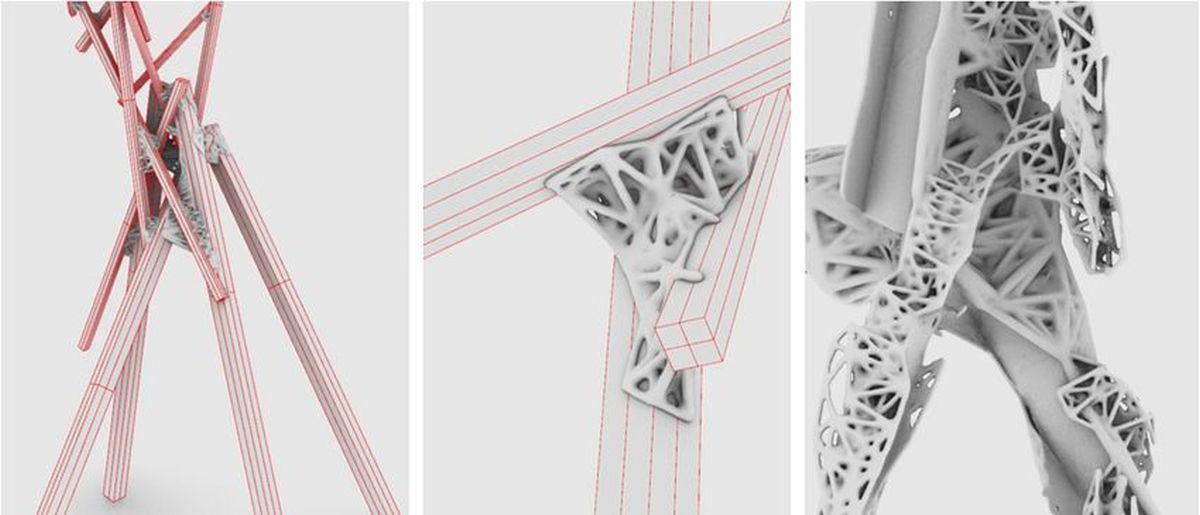
Fig. 3: Structurally optimized node (3rd version)
2. D2RO is controlled by computer-based algorithms, integrated with the Internet of Things (IoT) and its users. Physical and software components are, in this context, deeply intertwined. The static and dynamic modalities of the space involve customization and reconfiguration, which have been explored in the case study of an interactive facade.
When environments incorporate sensor-actuator mechanisms that enable buildings to interact with their users and surroundings in real-time, their conceptualisation and materialisation process requires D2RP&O chains that link design to production and operation of buildings. In this context, design becomes process- instead of object-oriented, use of space becomes time- instead of program- or function-based, which implies that architects design increasingly processes, while users operate multiple time-based architectural configurations emerging from the same physical space that may physically or sensorially reconfigure in accordance to environmental and user specific needs.
D2RP&O relies on interactions between human and non-human or cyber-physical agents and systems not only at design and production level but also at building operation level, wherein users and environmental conditions contribute to the emergence of multiple architectural configurations.
