RBlab
The Robotic Building (RB) laboratory has been established 2014 with external funding as the first robotic lab in the Faculty of Architecture and the Built Environment. The RB laboratory is equipped with a 6-axis KUKA robot, sensor-actuators, and powerful computers. Design to Robotic Production and Operation (D2RP&O) workshops held in the lab are aimed at integrating different modes and methods of robotic production and operation into computational design processes in order to explore and multi-materiality in architectural building systems. The workshops focus on developing D2RP&O methods for hybrid material systems, from micro to macro level as spatial, structural and architectural configurations.
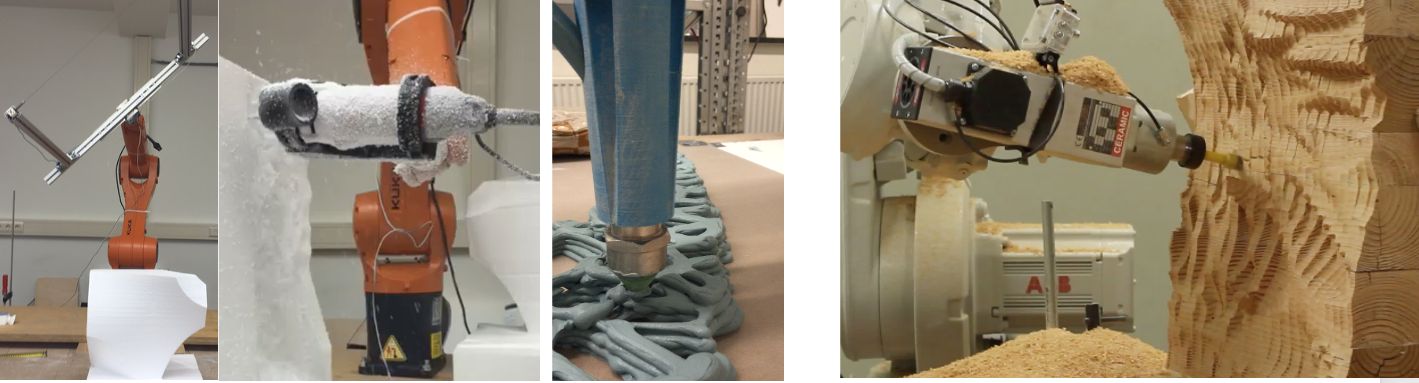
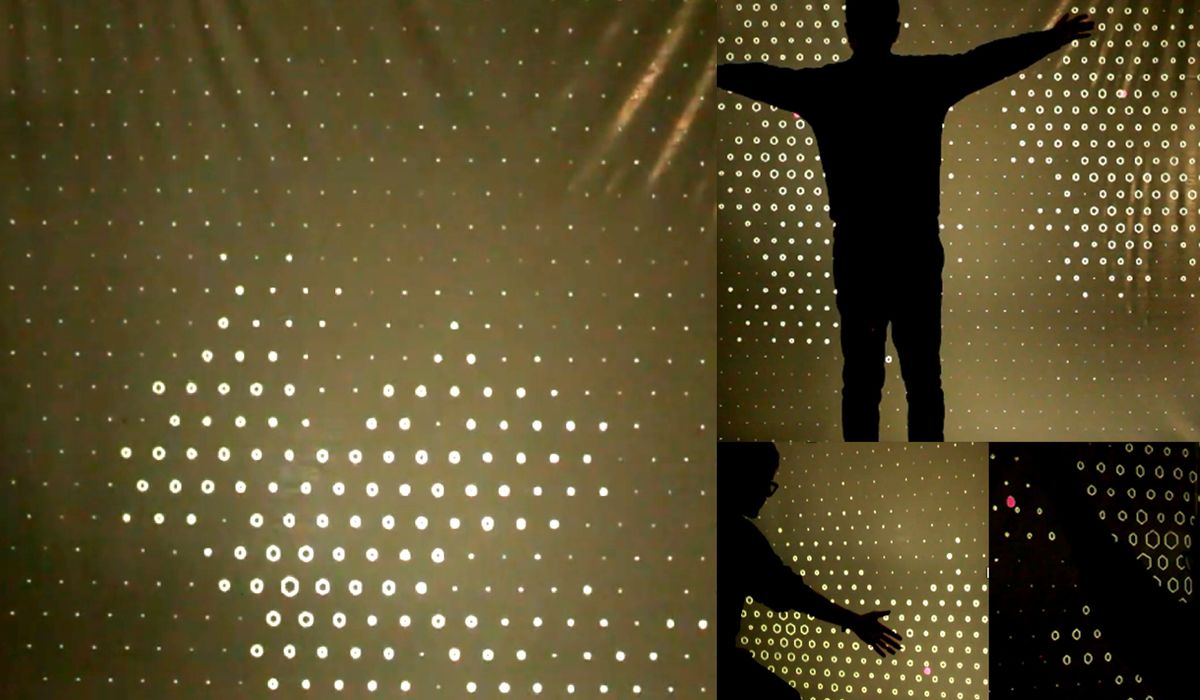
RB lab has developed expertise in robotic 3D printing with clay, silicon, and recyclable plastic; hot wire cutting and milling of EPS and wood; stacking linear elements. Depending on the methods and materials used, partners from academia and R&D such as ESA, PoliMi, UniFr, TU Eindhoven, HvA and industry such as Vertico, 3D Robot Printing, ABB, KUKA, etc. are involved. Results are exhibited at renowned venues such as Centre Pompidou and Dutch Design Week and are published on platforms such as Springer book series Adaptive Environments and Spool Cyber-physical Architecture. In addition, the RB lab has expertise in integrating sensor-actuators in the built environment. Both are using some level of Artificial Intelligence (i.e. Machine Learning) in the processes of production and operation.
When environments incorporate sensor-actuator mechanisms that enable buildings to interact with their users and surroundings in real-time, their conceptualisation and materialisation process requires D2RP&O chains that link design to production and operation of buildings. In this context, design becomes process- instead of object-oriented, use of space becomes time- instead of program- or function-based, which implies that architects design increasingly processes, while users operate multiple time-based architectural configurations emerging from the same physical space that may physically or sensorially reconfigure in accordance to environmental and user specific needs.
D2RP&O relies on interactions between human and non-human or cyber-physical agents and systems not only at design and production level but also at building operation level, wherein users and environmental conditions contribute to the emergence of multiple architectural configurations.