Jelle Feringa
PhD research: Architectural Robotics
Research into architectural robotics addresses the question of how to bridge the divide between academic research and industry in the domain of architecture by investigating aspects of computational design, robotic fabrication and their impact on practice via a series of experiments and case studies. Research sub-questions related to the architectural model, geometry and implicit fabrication are investigated in relation to topology optimization, robotic hotwire and hot-blade cutting.

2022
Architectural Robotics: Bridging the Divide between Academic Research and Industry
Sina Mostafavi
PhD research: Informed Architectural Robotic Materialisation
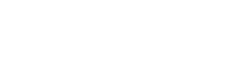
D2RP aims to introduce strategies for the integral production of complete buildings addressing structural and climatic-environmental, programmatic and user-specific, etc. requirements. This implies that the complete building process is considered in order to identify requirements for the robotic production of material- and energy-efficient buildings. The goal is to integrate production and operation aspects from the early stages of design.
Several experiments with optimized additive and subtractive production of computationally de-rived architectural and structural topologies have been implemented at scales ranging from architec-tural (macro) to componential (meso) to material (micro) scale. By employing performance-based and generative design methods as well as robotic manufacturing, D2RP processes establish a feedback-loop between design and production of buildings components at full-scale.
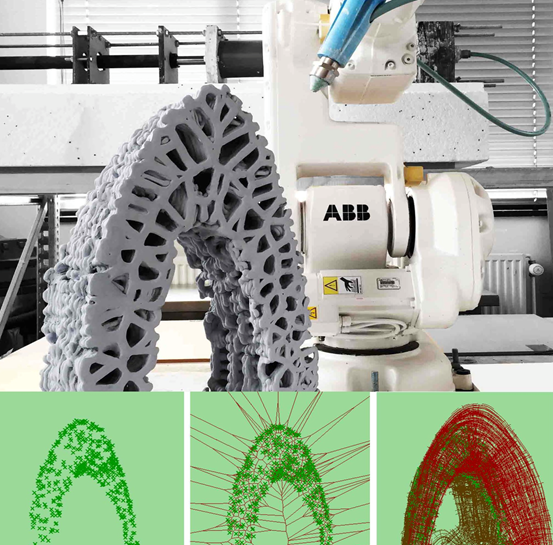
Since 2023 a batch of 6 PhD students affiliated with the RB lab, TU Delft, and U Antwerp, U Chieti-Pescara, NCKU Tainan, U Sydney implement in a coordinated manner research involving AI-supported D2RPA&O involving sustainable approaches at various scales.
Alex Liu Cheng
PhD research: Design, development, and implementation of a high-resolution intelligence framework based on Design to Robotic Production & Operation (D2RP&O) principles and methods
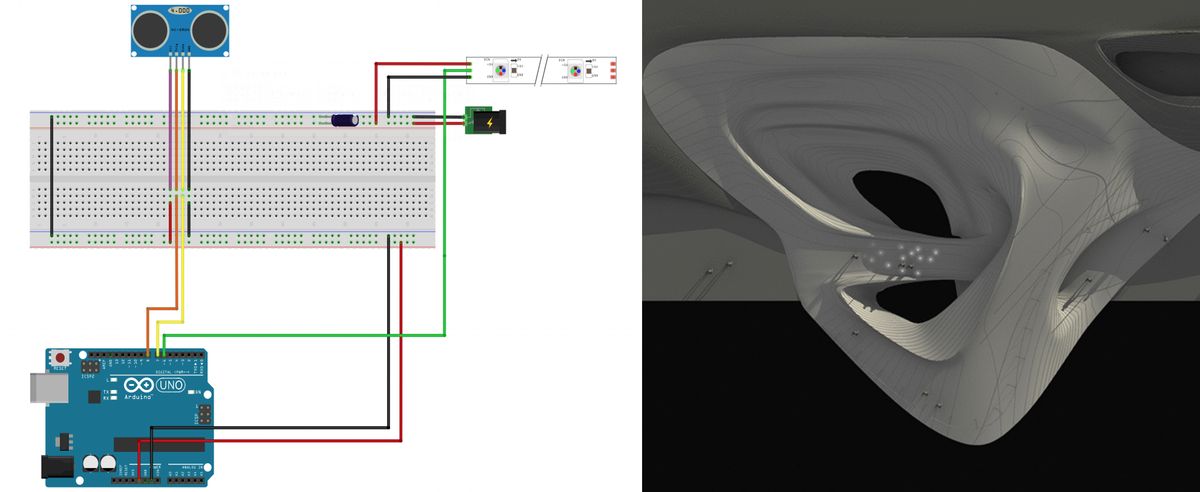
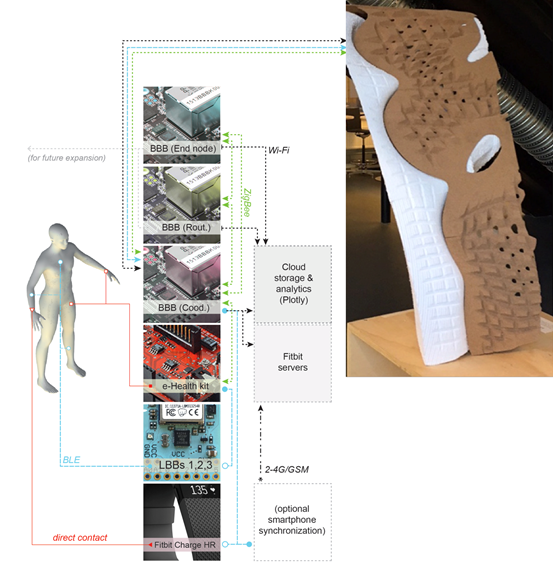
This PhD research situates computational intelligence in the form of Cyber-Physical Systems (CPSs) within the Adaptive Architecture discourse. The objectives are framed with respect to both a general and a specific scope. In the general scope, the proposal aims to develop a theoretical, methodological, technical, and technological framework for (a) the design, development, and seamless integration of cost-effective intelligent systems (physical and computational) into the built-environment; and (b) the design and robotic fabrication of corresponding optimized components to support and be supported by said systems, both via Design to Robotic Production & Operation (D2RP&O) principles and methods. The processes involved in the development of such a framework, as an alternative to existing intelligent frameworks, bear methodological consequences for certain societal challenges such as inefficient distribution and use of built-space, adaptation to rapid densification caused by demographic change, and to population migrations caused by catastrophic events, etc. In the specific scope, the proposal focuses on the deployment of this framework within the Ambient Intelligence (AmI) and Ambient Assisted Living (AAL) discourse, which aims to address an unavoidable and particularly pressing age-related demographic challenge. The expected benefits yielded by the proposed framework are consequential across scopes as they satisfy and extend beyond AAL and Activities of Daily Living (ADLs) desiderata.
Milica Pavlovic
PhD research completed 2020: Design tools for managing User Experience within systems of Ambient Intelligence
The research aims to contribute to the field of User Interaction and Experience Design, by providing a design methodology and toolset to be applied within the emerging projects for systems of Ambient Intelligence (AmI). This is to say that the research has identified a necessity for expanding the current practices in the UX field by supporting them with the set of tools to be used as a backbone for structured design processes. The need derived from the nature of ongoing practices observed within the industries of interest, as well as the research streams in the academic field. Furthermore, meaningful contribution is targeted also towards the other fields that practice design of such systems, and these are Software Engineering, Human-Computer Interaction, Artificial Intelligence and Machine Learning, Architecture, and others. The contribution of the research expands on diverse practiced Design sectors of nowadays and proposes a convergence of the same towards the approach of designing for experiences and user values. In this context, it is to state that the research aims for verifying and updating the tools to be used for envisioning and designing AmI systems, thus supporting the definition of Ambient UX practices. Potentially, the research will provide a base structure for developing a software to be employed in the practices, for supporting creation of a common language between all the parties and stakeholders involved in the design project.