Robotic Terrain Mapping
Year: 2024-26
Project leader: Henriette Bier
Project team: H. Bier, A. Hidding, A. Becoy, J.R. Tan, W. Chung, V. Laszlo (TU Delft), F. Romio (UniFE), and G. Calabrese (Ud'A)
Supervisors / Partners: Chris Verhoeven, Luka Peternel and Raj Rajan (TU Delft), Silvio Rotolo (U Palermo), Alessandro Licciardello (Associazione Naturalistica I Nebrodi), Gian Gabrielle Ori (U Chieti-Pescara), and Giuseppe Priolo (CAI Catania)
Funding: 20K
The robotic-supported terrain mapping relies on Computer Vision (CV). The CV component generates a detailed depth map from synthetic imagery to combine this depth map with an adaptive 3D printing process, which is proposed to ensure level surfaces at various depths, facilitating precise foundation and habitat placement within the demanding context of lava tubes. Significantly, synthetic imagery is employed due to the absence of real lava tube photos at this early stage of the current exploration. The focal point lies in utilizing advanced deep learning (DL) algorithms and convolutional neural networks (CNN) to generate depth maps for extra/-terrestrial environments.
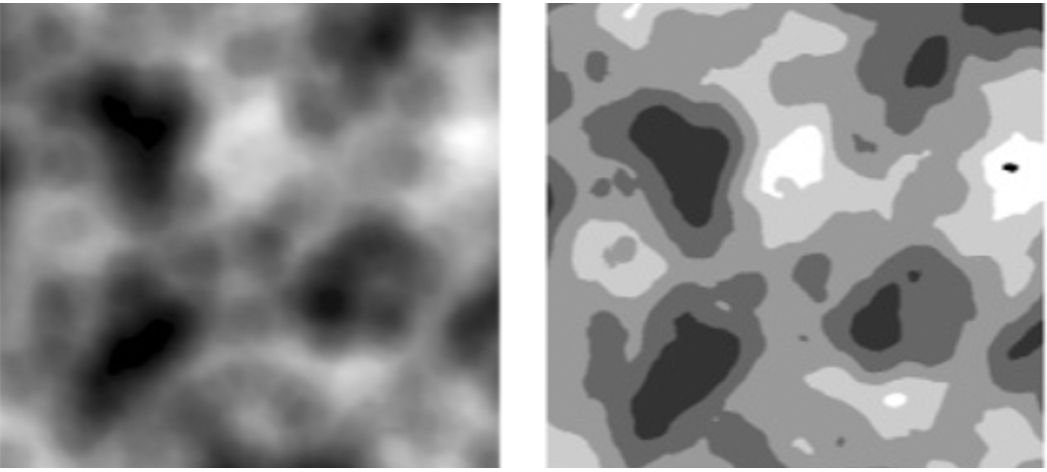
Depth Maps: Original input (left) and simplified depth map (right). The image underwent a thresholding operation, classifying pixels into five distinct intensity levels. This segmentation technique provides nuanced distinctions in visual features by categorizing the image into five layers based on intensity values. The choice of five layers strikes a balance between computational efficiency and the need to capture both coarse- and finer-grained structures in the lava tube. While optimizing computational resources, future adaptations may consider adding layers to enhance representation, acknowledging the trade-off between simplicity and the depth required for a more detailed analysis (Calabrese et al. 2024).
The mapping is tested in a lava tube in Sicily in collaboration with U Palermo, Associazione Naturalistica I Nebrodi, and U Chieti-Pescara.
In addition to robotic mapping, scanning using cameras has been implemented and results were compared to identify optimal approach for increasing accuracy and efficiency. The overall strategy relies on multi-techniques to ensure comprehensive data acquisition and provide a robust mapping methodology for future robotic exploration and extraterrestrial habitat construction.