Rhizome 1.0: Development of an Autarkic Design-to-Robotic-Production and -Operation System for Building Off-Earth Habitats
Year: 2020-2022
Project leader: Henriette Bier
Project team: Henriette Bier, Arwin Hidding, Max Latour, Vera Laszlo and MSc students from BK; Angelo Cervone, Roland Schmehl, and BSc students from AE; Luka Peternel and MSc students from 3ME, TUD.
Consultants: Ken Gavin from CiTG, Vera Popovich from 3ME, and Yinglu Tang from AE
Collaborators / Partners: ESA and Vertico
Funding: 130K
Dissemination: Spool CpA 2021
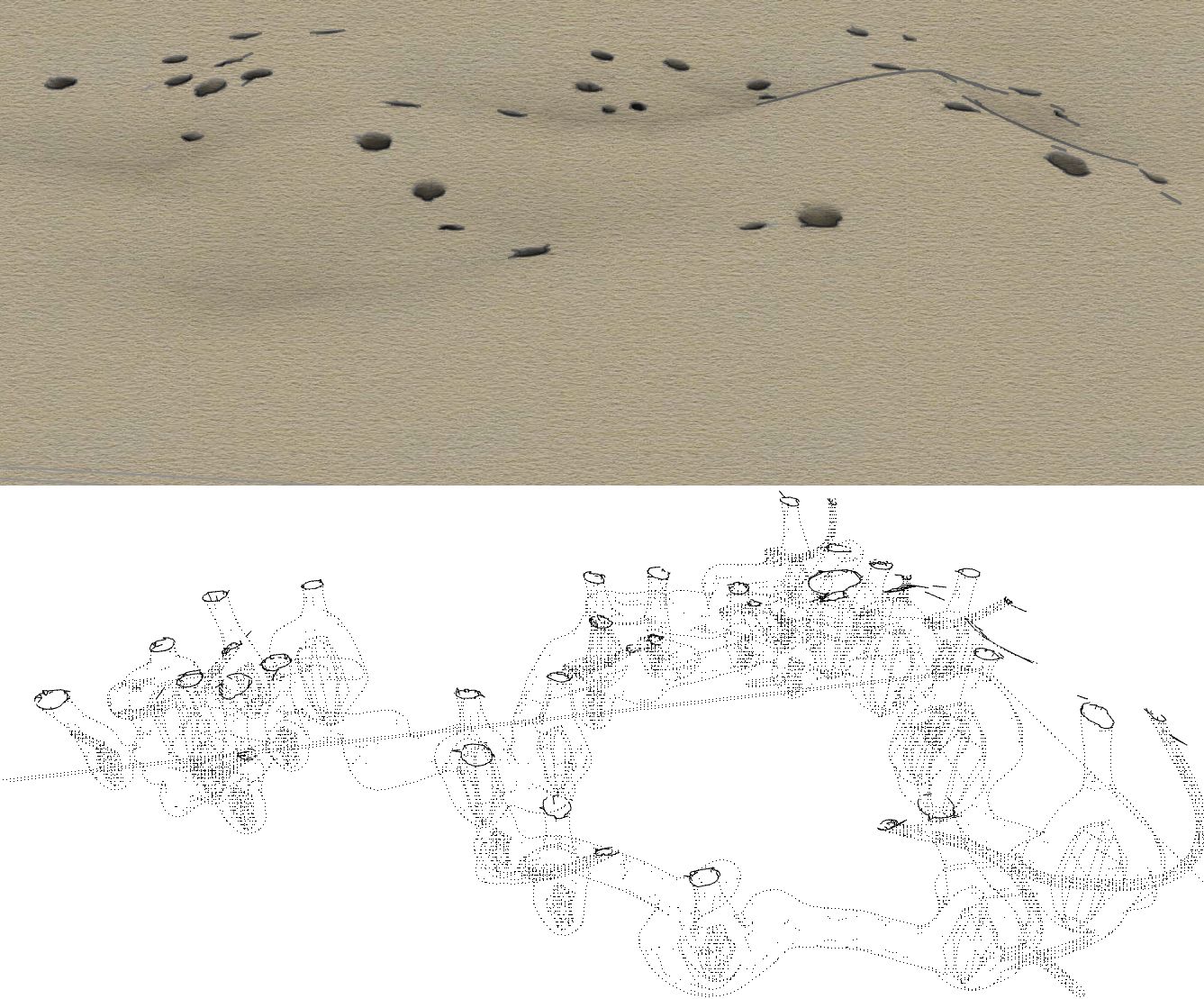
In order for off-Earth top surface structures built from regolith to protect astronauts from radiation, they need to be several metres thick. With support from European Space Agency (ESA) and Vertico, the Technical University Delft (TUD) advanced research into constructing habitats in empty lava tubes on Mars in order to create subsurface habitats. By building below ground level not only natural protection from radiation is achieved but also thermal insulation because the temperature below ground is more stable. A swarm of autonomous mobile robots developed at TUD scans the caves, mines for in situ resource utilisation (ISRU), and with the excavated regolith that is mixed with cement constructs the habitat by means of automated and Human-Robot Interaction (HRI) supported Design-to-Robotic-Production-Assembly and -Operation (D2RPA&O) methods developed at TUD. The 3D printed rhizomatic habitat is a structurally optimised porous structure with increased thermal insulation properties due to its porosity. To regulate the indoor environment a Life Support System (LSS) is considered, which is, however, outside of the scope of the presented research. Instead, the production and operation of the habitat are explored by combining an automated kite-power system with solar panels in a microgrid with the goal to develop an autarkic D2RPA&O system for building off-Earth subsurface autarkic habitats from locally-obtained materials.

The project is based on the idea submitted on the ESA's Open Space Innovation Platform (http://www.esa.int/Enabling_Support/Preparing_for_the_Future/Discovery_and_Preparation/ Implemented_OSIP_ideas_December_2020) with a team consisting of Dr. Henriette Bier (architecture: RB), Dr. Roland Schmehl (aerospace: wind energy), Dr. Angelo Cervone (aerospace: space systems engineering), MSc. Arwin Hidding (architecture: RB), MSc. Arise Wan (architecture: RB), MSc-cand. Edwin Vermeer (architecture: RB), BSc-cand. Maneesh Verma (aerospace: swarm robots), MSc-cand. Krishna Jani (architecture: RB), MSc-cand. Emma Chris Avramiea (architecture: RB), and MSc-cand. Siddharth Popatlal Jain (architecture: RB).
(Read more) http://cs.roboticbuilding.eu/index.php/Shared:2019Final
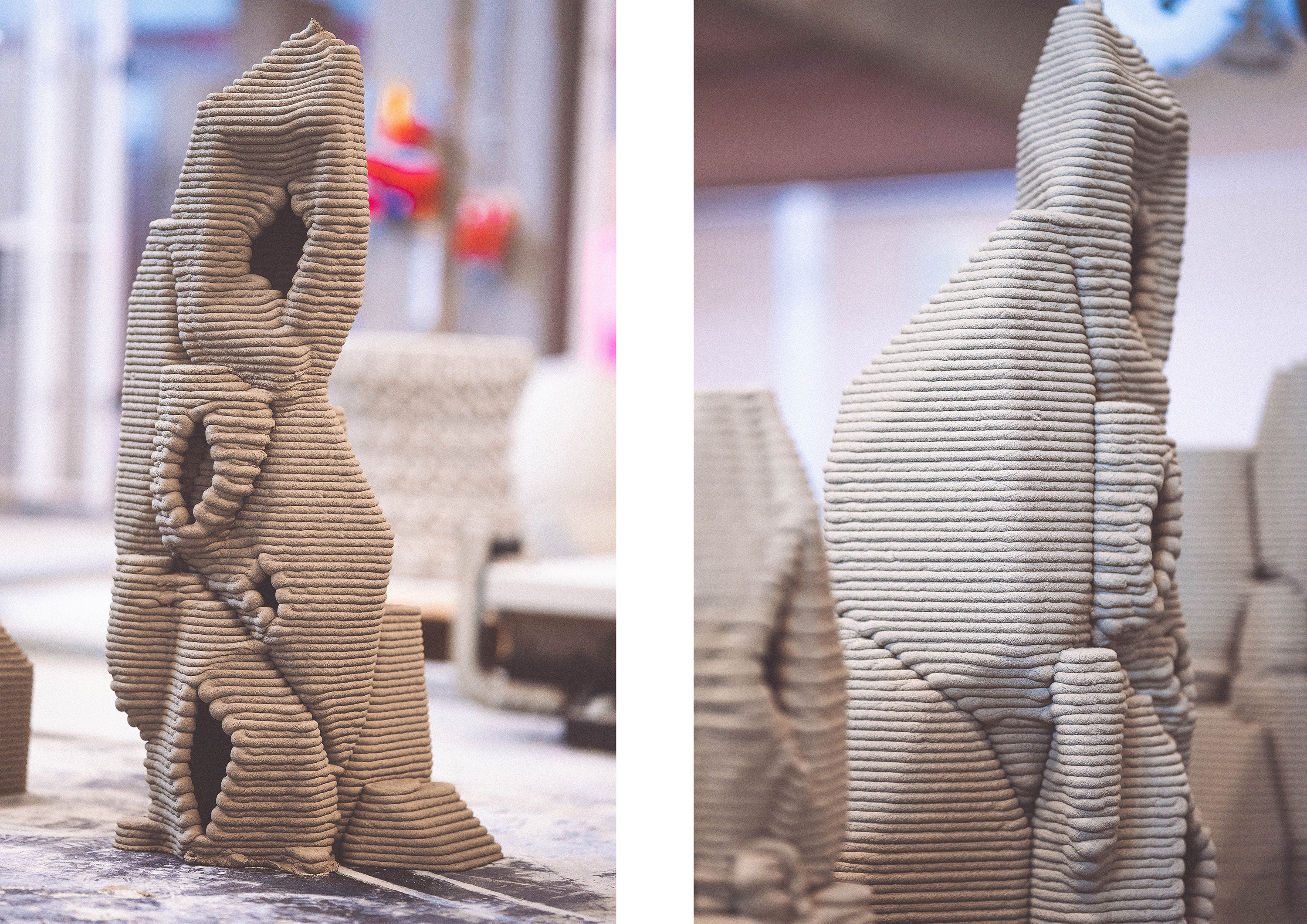
The additive D2RP process currently explored in laboratory setup using clay, silicon and thermoplastic elastomers represents the basis for the 3D printing approach with regolith-based concrete that is employed in this project. The regolith simulant, MGS-1, chosen for its availability, similar composition to 'global' basaltic soil composition, and also cheap price when ordered from https://exolithsimulants.com/collections/regolith-simulants is mixed with cement, which can be produced on Mars but infrastructure for producing it needs to be already in place (leaving the question of what would be the first structure built from open).
The 3D printing with concrete approach developed by Vertico represented the basis for the 3D printing approach with regolith-based concrete developed in this project. The printed structure is a structurally optimised porous structure, which has increased insulation properties and requires less material and printing time. It relies on a Voronoi-based material, component, and building design that facilitates all functionalities. The assumption that porous materials have improved insulation properties is based on experiments implemented with ceramic clay at TUD. Expected increased insulation of porous concrete has been proved by implementing numerical simulations and experimental testing. Printed components were assembled with support of Human-Robot-Interaction (HRI) technology and use of rovers.

Not only the assembly, which was the focus of the project, but the complete construction of the habitat is implemented with HRI support and rovers that are equipped with robotic tools. Rovers deployed for building the structure have various sizes as specialised tools are needed for different types of tasks. Although, some robots share a base design between themselves by having the same mobile platform on which different types of payloads are attached (for example, a robotic arm fitted with a milling or 3D printing tool). The mobile platform provides the payload with necessary basic environmental awareness, communications, power and navigational support to ensure its safety, and may allow the payload to command the mobile platform as needed to keep itself in sync with its swarm’s task.
The swarm, composed of different types of robots, executes tasks by using Swarm Intelligence (SI). The SI is a decentralised, self-organising algorithm which manages the division of labour between various types of robots at different times. To deal with inherent uncertainties, the systems engineering approach chosen for this project has started with the definition and the preliminary design of an Interplanetary Transportation System serving the requirements and needs of the Rhizome habitat. The main scope of this design effort was three-fold: (1) define a concrete, realistic timeline and Concept of Operations for the transportation flights serving the habitat, during both its construction and operation; (2) establish how many materials, tools and people (including their necessary life support items) can be brought to Mars and back to Earth (when appropriate) per flight.
This project employs a hybrid wind-solar energy system to power the construction of the Mars habitat as well as its later use. The aerodynamic force that a kite generates depends linearly on the density of the atmosphere, and linearly on the wing surface area. Since the power output of a kite power system scales with the cube of the wind speed, a speed increase of a factor of two leads to an eight-fold power output. This means that to some degree, the higher wind speeds on Mars compensate for the very low density on the red planet. Another factor that positively influences the flight operation of a kite on Mars is the lower gravity, such that a kite power system can harvest wind energy already at lower ‘cut in’ wind speeds.
(Read more)
http://cs.roboticbuilding.eu/index.php/Shared:RhizomeReview1
http://cs.roboticbuilding.eu/index.php/Shared:RhizomeReview2
http://cs.roboticbuilding.eu/index.php/Shared:RhizomeReview3
http://cs.roboticbuilding.eu/index.php/Shared:RhizomeReview4
http://cs.roboticbuilding.eu/index.php/Shared:RhizomeReview5
http://cs.roboticbuilding.eu/index.php/Shared:RhizomeReview6